































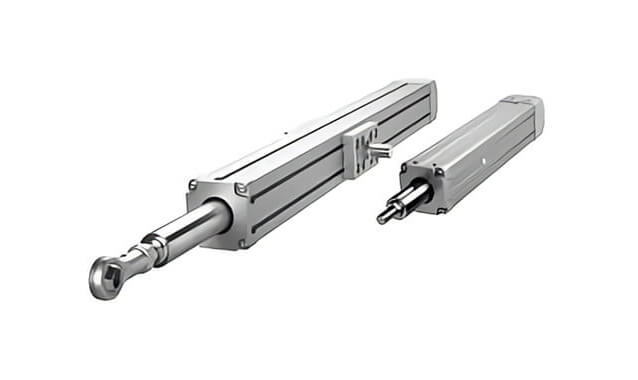












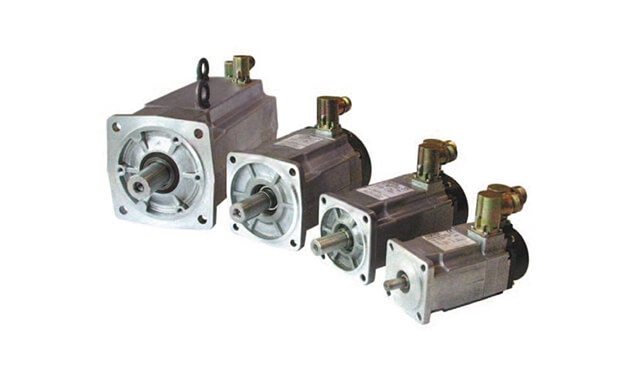












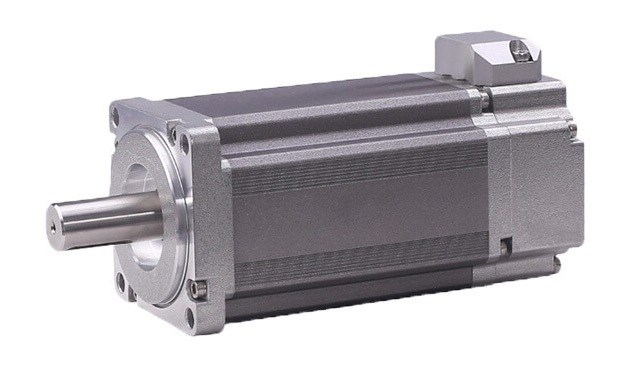






















































机器人在工业生产制造中的应用已经越来越普遍了。但是大家有没有仔细观察过这些机器人手臂的关节。

比如上图所示的就是传统的工业机器人,可以很明显看到在它们的关节上“外挂”的伺服电机,而除了我们能够看见的电机,在这些关节里面其实还有着非常复杂的(谐波)减速机和制动抱闸机构,这使得机器人的关节变得异常“肥大”。
当然,这对于许多大型机器人并不是什么太大的问题。

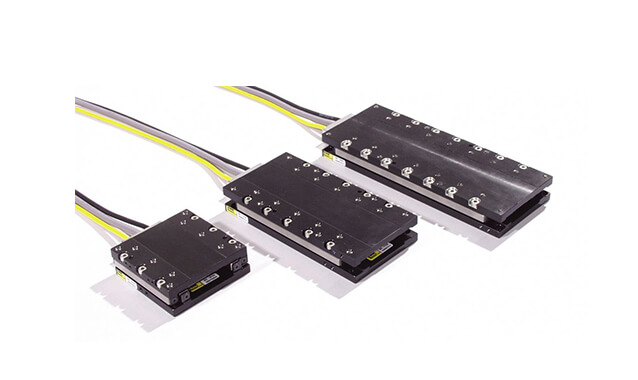
但是对于那些正被越来越多的应用于产线和设备周围的小型机器人、尤其是需要配合人们完成各种复杂的辅助生产操作的协作机器人来说,关节的尺寸就变得十分关键了。

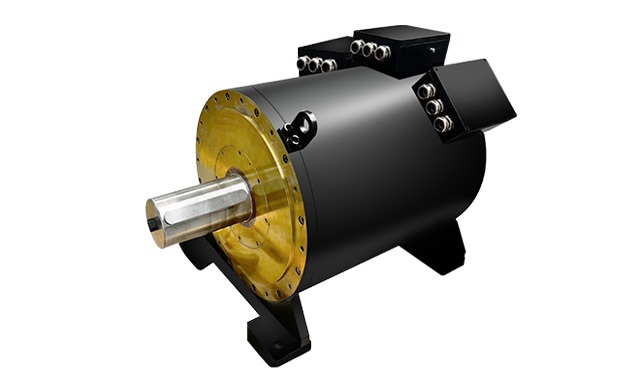
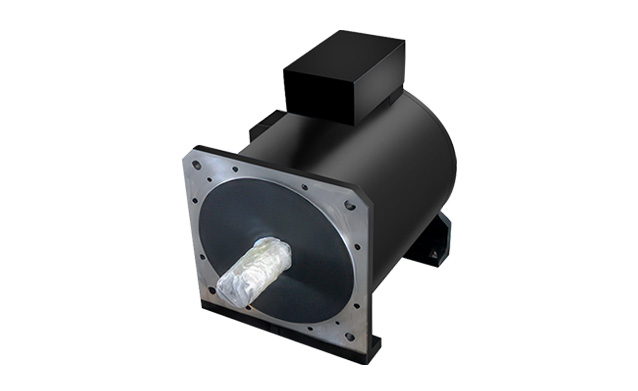
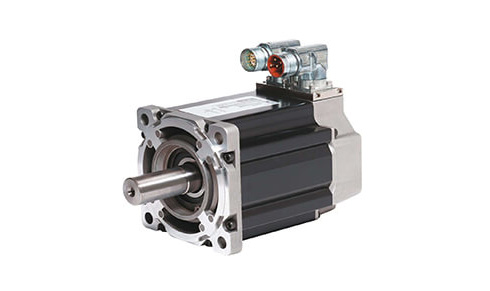
此时,在这种小型机械臂中,通常需要使用上图这种无框直接驱动(力矩)电机,以减小机器人关节的尺寸、减轻机器人重量,并提升其动作效率。
而使用直接驱动电机,也会带来一个新的问题,就是较高的技术实施难度和应用集成成本。
这一方面是因为无框电机本身复杂的操作使用流程,另一方面,在设计制造机器人过程中,需要将力矩电机、编码器反馈、制动抱闸和谐波减速机...等多个零散的运控传动组件集成到机器人关节这个尺寸极为有限的狭小空间中,同时还必须确保机械臂快速、灵活和可靠的运动性能。由此而带来的超长开发周期和高昂制造成本,在一定程度上阻碍了小型关节机器人的广泛应用和普及。
这就引出了我们接下来要和大家聊的一款产品:

这款名为 RGM 的机器人关节模组,是 Kollmorgen 在本月初刚刚发布的新产品,并在 CIROS 中国机器人展上做了首次展示。

从现场展示的样品看,RGM机器人关节模组体积仅一只拳头大小。侧面看,其外形框架呈 T 字型。下方为模组的法兰底座,用于将其安装在上一级机械臂的端部;左侧为电机端盖,右侧为电机轴输出,连接下一级机械臂。

顶部贴着的标签上印着 “DEMONSTRATION UNIT”(演示用产品),且标注的产品序列号为 “017”,难不成这是从工厂下线的第 17 台模组?

整个 RGM 机器人关节模组的外表面看上去非常简单,外壳上没有任何电气连接端口,可以达到 IP54 的环境防护等级。

但从官方资料上的这张图片看,RGM 机器人关节模组上尾部的蓝色端盖应该是可以从主体框架上拆下来的,目测其打开后可用于电气线路的连接。

来到电机的输出端,可以大致看到内圈的转子输出轴,和外圈用于安装和连接负载的法兰圆盘。
同时,我们在这里能看到从机器人关节模组内部引出的电气接线,从线缆的颜色推测,红蓝为直流电源,灰色应为通讯信号线。这说明在 RGM 模组内部是有可用于穿过线缆的空心轴腔体的。

从侧面近距离观察 RGM机器人关节模组输出端,可以看到法兰盘圆柱体外表面上有 8 个螺纹孔,据介绍这是用于安装和固定下一级机械臂的。
.jpg")
不难理解,连接在法兰盘上的机械臂,会在模组转子输出驱动力的作用下,围绕模组进行圆周运动。
这就是为什么 RGM 被称为“机器人关节模组”的原因。
那么,这样一款产品有什么特别之处呢?

首先,如上图所示,此款 RGM将包括伺服驱动器、无框直驱电机、谐波减速机、反馈编码器和制动器抱闸...等在内的多个机器人关节核心部件连接整合在一起,集成在一个模块化组件中,并被设计封装成适合机器人关节的 90° 转角外形样式,可以作为一个完整的关节总成直接用在工业机器人的机械臂上。

这就是说,用户在设计和制造机器人时,可以不必考虑复杂的机械臂关节连接和动力集成,直接使用 RGM 关节模组连接和驱动机械臂,从而省去大量零散组件的设计、安装、集成和测试等一系列复杂步骤和流程,尤其是,无需再为无框力矩电机的使用而消耗大量工时。

动力配置方面,由于每台关节模组内部都集成了电机驱动器,采用 48V 直流动力电源和 CANopen 控制总线,所以,如果使用 RGM 关节模组,便无需再为机器人的各个关节轴配备单独的伺服驱动器,只需要使用集成 CANopen 总线的机器人运动控制器即可。这将节省大量电气柜安装空间,让设备系统变得更加紧凑。
再看电气连接,因为多个关节模组的电源和通讯端口,是可以按照链式拓扑结构串行连接的,加之 RGM 使用了空心轴无框电机和谐波减速机,这样,集成了 RGM 关节模组的机器人手臂,其电气线缆是可以直接串联敷设在机械臂空腔内部的,而不是像传统机器人那样并排挂在机械臂表面。这样不仅让机器人外观变得十分简洁,更重要的是,因为在关节处并没有多根并联电缆的扭转弯折,从而降低了机器人工作时的运动负载;同时,更少的线缆数量还将会减轻机械臂的重量,这些都有助于提升机器人的工作效率。

RGM机器人关节模组采用了 19 位 Biss 反馈,可以达到 0.001° 的重复定位精度。同时,注意到在前面的产品拆解图中显示,RGM 内部在输入端和输出端分别各有一个编码器,通过比较两个编码器的位置和速度反馈,参照驱动电流和电机扭矩的输出,可以判断出模组所在关节受到外界作用力的大小,将这一系列数据信息反馈给控制器,就能够在不额外增加辅助传感器的情况下,很方便的实现对机器人的安全控制。

另外,从官方发布的资料看,为了方便产品的应用和设备开发,Kollmorgen 还为用户提供了相应的关节模组选型软件,机器人制造商可以基于其用户需求和应用场景,包括机械尺寸、工作位置、活动范围、运动曲线...等等,自行配置和选择合适的关节模组产品。

如此看来,通过将多个零散的机械臂关节组件整合封装在一个集成模组中,RGM机器人关节模组实际相当于是一套用于机器人关节的一站式解决方案。个人认为,这种集成模组化关节部件,将很有可能彻底改变工业机器人的制造流程,因为相比传统的机器人制造方法,使用 RGM 这种集成式关节模组,将极大简化机器人关节的动力集成,并降低工业机器人的开发和应用门槛,让机器人制造商更加专注于其机器人应用场景的开发,而不是纠结于复杂的动力机械组件。
按照官方的说法,RGM机器人关节模组将适用于有效负载 ≤10kg 的协作机器人 / 轻型机器人。


 浙公网备案33010802010418
浙公网备案33010802010418 