













































































































.jpg")
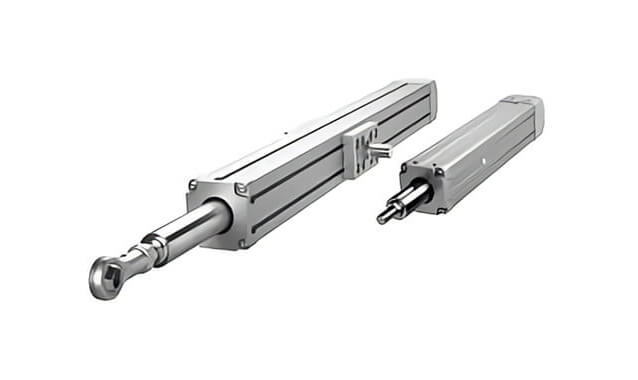
大多数工程师认识到,减速机可用于在被移动的物体和被驱动的电机之间创建更好的惯性匹配。简而言之,它取决于减速机比率,其中物体反射惯性与电机相比减少了1 / 比2。
那么正确的惯性应该是什么呢?
通常,经验法则表明,在运动控制应用中,物体惯性应不大于电机惯量(5:1比率)的五倍。这将提供非常僵硬和可控制的运动。
然而,有时难以达到这个比例,这主要是因为当您为减速器增加更多比率时,您将需要更高速度的电机,这可能无法使用或可能超过输入速度限制。减速机。此外,由于需要将额外的齿轮结合到其中,因此选择更高的齿轮头比通常会更昂贵。
以下是我们的应用工程专家对您需要了解的齿轮箱和伺服电机的一些有用见解:
.png")
为了优化电机控制,设计工程的目标是创建一个解决方案,其中对象惯性与电机转子惯量比合理地接近1:1。这个规则并不是绝对的,有几个因素影响它,包括载荷分布,加速/减速率,稳定时间要求,摩擦含量和电机耦合技术。
这些一般指导原则假设电机可以为负载和移动要求提供足够的扭矩。如果电机尺寸很小,则无论惯性比如何,都可能会出现稳定性和调整问题。当机械装置磨损并且装载特性随时间缓慢变化时,这也可能导致问题。
你需要知道的5件事
在大多数应用中,10:1惯性比提供良好的伺服控制,假设平衡负载和允许的平均时间> 10毫秒。
当需要<10毫秒的稳定时间时,接近1:1的比率将提供更好的稳定性和更有可能实现所需的稳定时间。
非平衡负载会影响稳定性和稳定时间,因此接近1:1的比率对于提高性能非常重要。
如果应用要求允许较低的加速/减速速率,较长的稳定时间或较低的位置精度,则高于10:1的惯性比是可接受的。
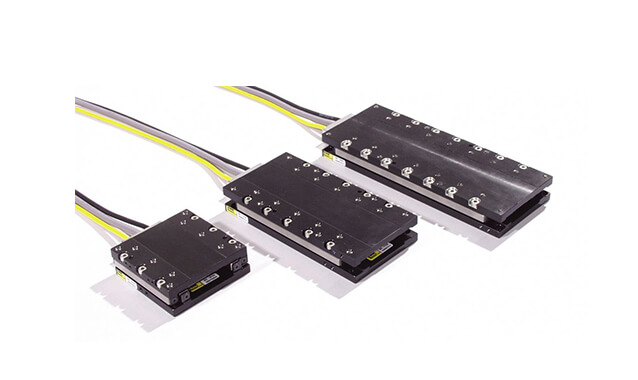
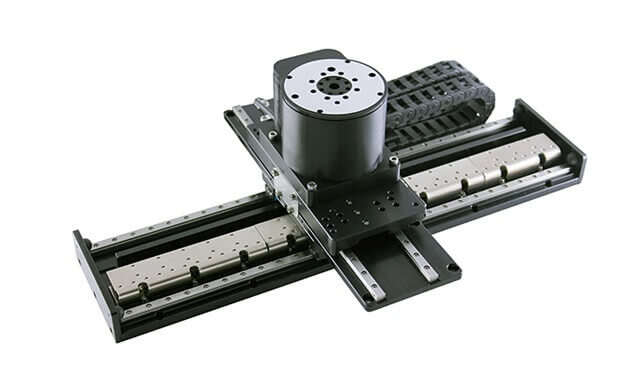
直接驱动和直线电机(或带直接电机的旋转电机)可以承受更高的惯性比,因为负载通常直接安装在电机的转子/压力机上,从而消除了大部分耦合器的合规性问题。如果可以接受较低的加速/减速速率和较慢的速度,同时仍然可以实现高位置精度,则可以通过高达300:1(或更高)的惯性比来解决一些直接驱动应用。
请记住这些其他因素
摩擦含量会影响稳定时间。除非使用直接驱动或线性系统,否则纯惯性负载(仅来自轴承的最小摩擦力)将在更接近惯性匹配时表现更好。
旋转电机联轴器的选择会影响稳定性和稳定时间。耦合器中的扭转刚度很重要,同时仍允许一些轴向不对准。
更高分辨率的反馈将有利地影响稳定性和调谐,从而影响整体伺服控制。


 浙公网备案33010802010418
浙公网备案33010802010418 